I, DRAWING ROBOT

Physical Computing, 1 week
VISUAL EXPRESSION THROUGH EYE MOVEMENT

Our experience empowers those with motor disabilities to express their vision on canvas. At the end of the experience, participants can take home their unique drawing capturing a one-of-a-kind experience.
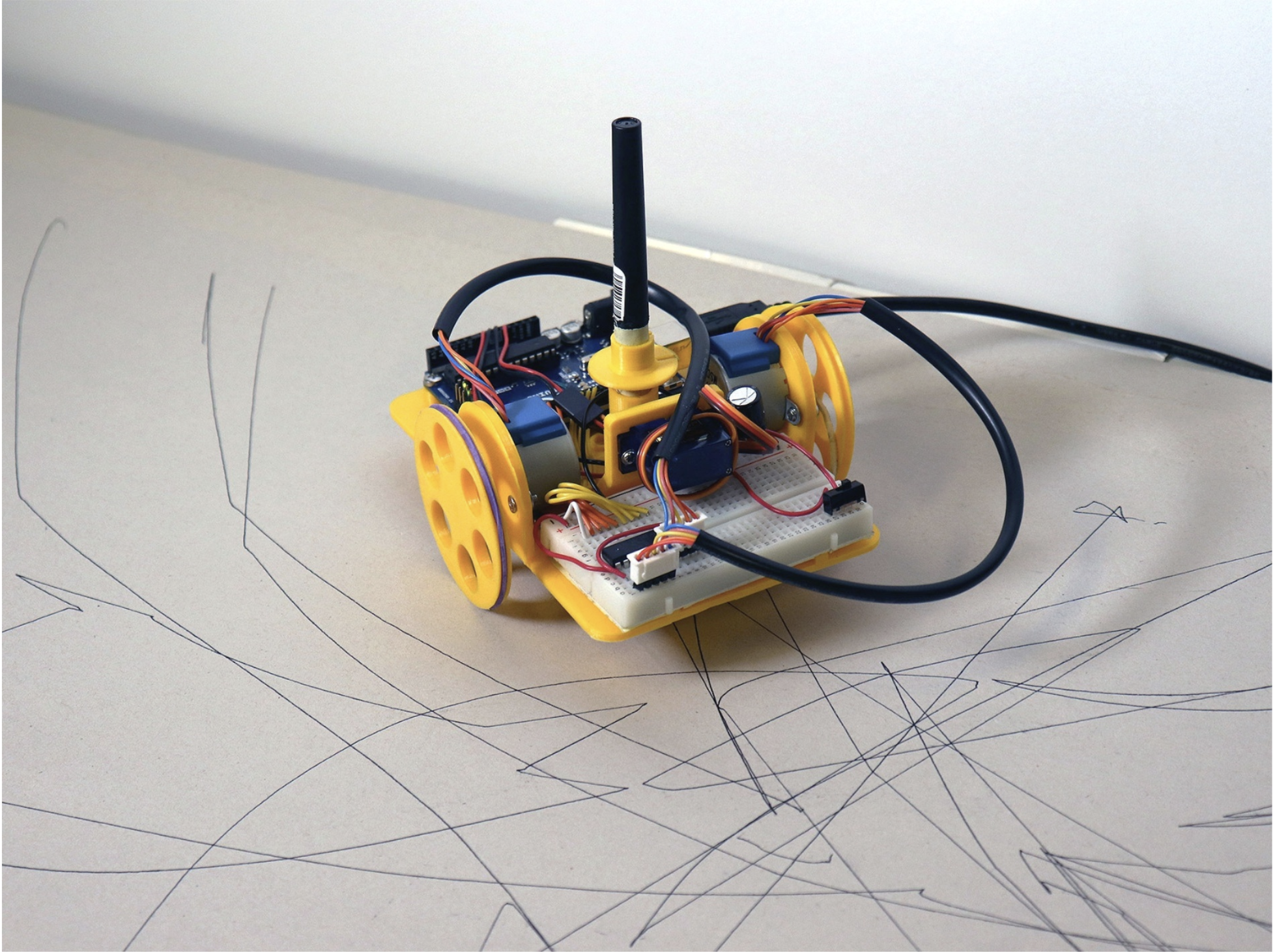
The OpenCV library was used in Processing to track eye movements, which were then mapped to cardinal directions within a Processing sketch. To interpret these directional instructions, signals are sent from Processing to two Arduinos, one to control the LEDs, another to ‘steer’ the drawing robot on canvas, creating abstract patterns.
Research
Concept Development
Systems Design
Video Editing
Research
Concept Development
Systems Design
Video Editing
Research
Concept Development
Systems Design
Video Editing
MY ROLE
MY ROLE
MY ROLE
MY ROLE

Concept Development
Prototyping
Videography
Research
Concept Development
Systems Design
Video Editing
Research
Concept Development
Systems Design
Video Editing
Research
Concept Development
Systems Design
Video Editing
TOOLS
TOOLS
TOOLS
TOOLS
Adobe Illustrator
Adobe Premiere Pro
Arduino
Fusion360
Processing
Adobe Photoshop
Adobe Premiere Pro
Arduino
Rihnocerous 3D
Adobe Photoshop
Adobe Premiere Pro
Arduino
Rihnocerous 3D
Adobe Photoshop
Adobe Premiere Pro
Arduino
Rihnocerous 3D
BRIEF
BRIEF
BRIEF
BRIEF
"Create a drawing machine that does not use a screen as means of expression and feedback."
"Create a drawing machine that does not use a screen as means of expression and feedback."
"Create a drawing machine that does not use a screen as means of expression and feedback."
"Create a drawing machine that does not use a screen as means of expression and feedback."
PROCESS
PROCESS
PROCESS
PROCESS
The design process involved concept development and rapid prototyping. Before developing a concept, we asked ourselves the question: who might use a drawing machine and why. Originally conceived as a serious tool to help those with severe motor handicaps to express themselves, this project bloomed into a greater, more inclusive experience that could serve a more general purpose, while not compromising on usability for its initial target group.
Regular feedback and iteration were crucial to the rapid prototyping phase. Based on previous learnings, we tested our ideas early on, both in terms of concept and feasibility (e.g., locating software that would help with eye tracking and exploring ways to convert eye tracking into drawing). We also coded and fabricated in parallel to optimize workflow. With user testing, our team discovered that users needed to know what their eye movement translated to without looking at the robot. This led us to develop the feedback lights.
The design process involved concept development and rapid prototyping. Before developing a concept, we asked ourselves the question: who might use a drawing machine and why. Originally conceived as a serious tool to help those with severe motor handicaps to express themselves, this project bloomed into a greater, more inclusive experience that could serve a more general purpose, while not compromising on usability for its initial target group.
Regular feedback and iteration were crucial to the rapid prototyping phase. Based on previous learnings, we tested our ideas early on, both in terms of concept and feasibility (e.g., locating software that would help with eye tracking and exploring ways to convert eye tracking into drawing). We also coded and fabricated in parallel to optimize workflow. With user testing, our team discovered that users needed to know what their eye movement translated to without looking at the robot. This led us to develop the feedback lights.
The design process involved concept development and rapid prototyping. Before developing a concept, we asked ourselves the question: who might use a drawing machine and why. Originally conceived as a serious tool to help those with severe motor handicaps to express themselves, this project bloomed into a greater, more inclusive experience that could serve a more general purpose, while not compromising on usability for its initial target group.
Regular feedback and iteration were crucial to the rapid prototyping phase. Based on previous learnings, we tested our ideas early on, both in terms of concept and feasibility (e.g., locating software that would help with eye tracking and exploring ways to convert eye tracking into drawing). We also coded and fabricated in parallel to optimize workflow. With user testing, our team discovered that users needed to know what their eye movement translated to without looking at the robot. This led us to develop the feedback lights.
The design process involved concept development and rapid prototyping. Before developing a concept, we asked ourselves the question: who might use a drawing machine and why. Originally conceived as a serious tool to help those with severe motor handicaps to express themselves, this project bloomed into a greater, more inclusive experience that could serve a more general purpose, while not compromising on usability for its initial target group.
Regular feedback and iteration were crucial to the rapid prototyping phase. Based on previous learnings, we tested our ideas early on, both in terms of concept and feasibility (e.g., locating software that would help with eye tracking and exploring ways to convert eye tracking into drawing). We also coded and fabricated in parallel to optimize workflow. With user testing, our team discovered that users needed to know what their eye movement translated to without looking at the robot. This led us to develop the feedback lights.
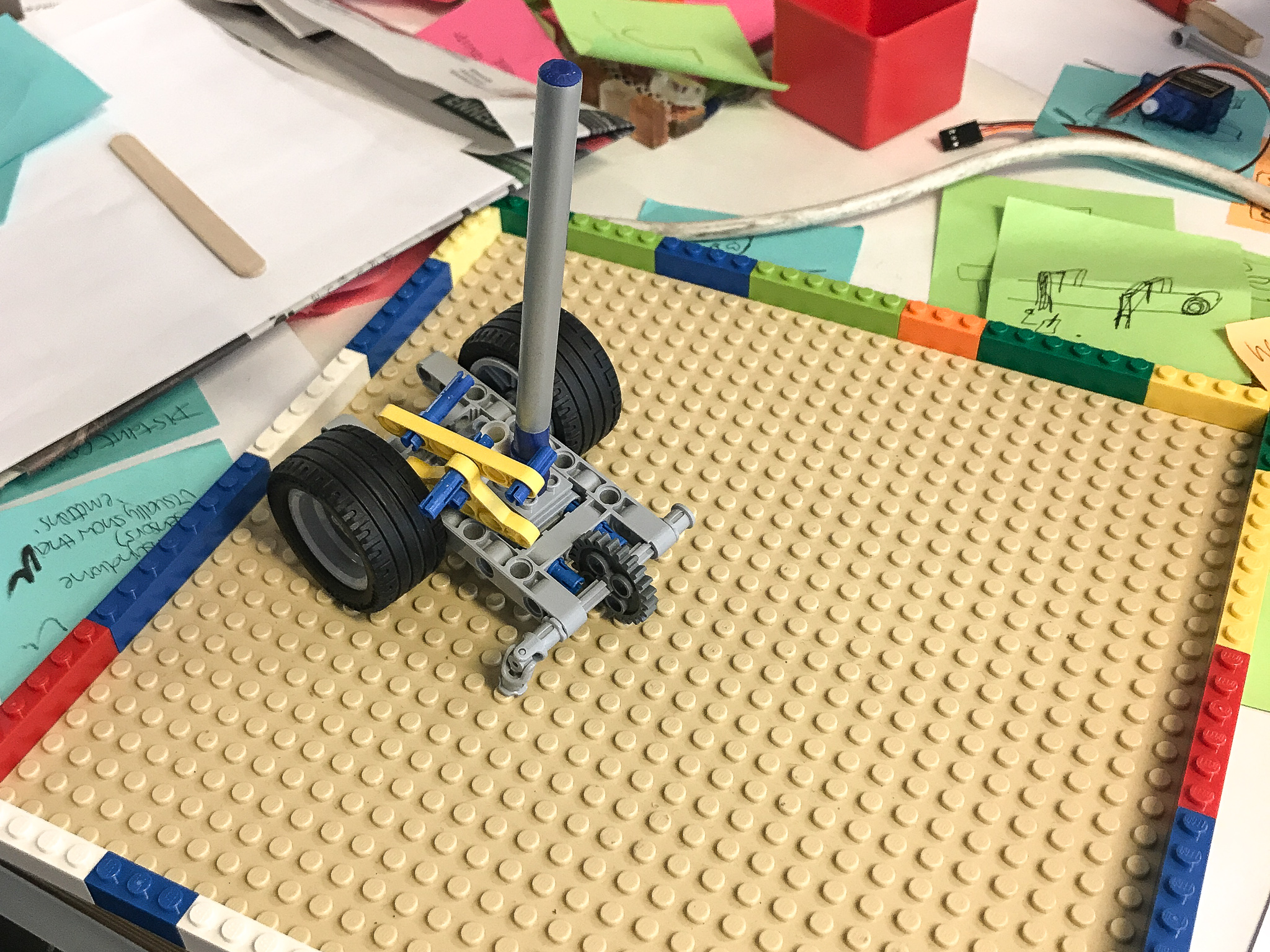
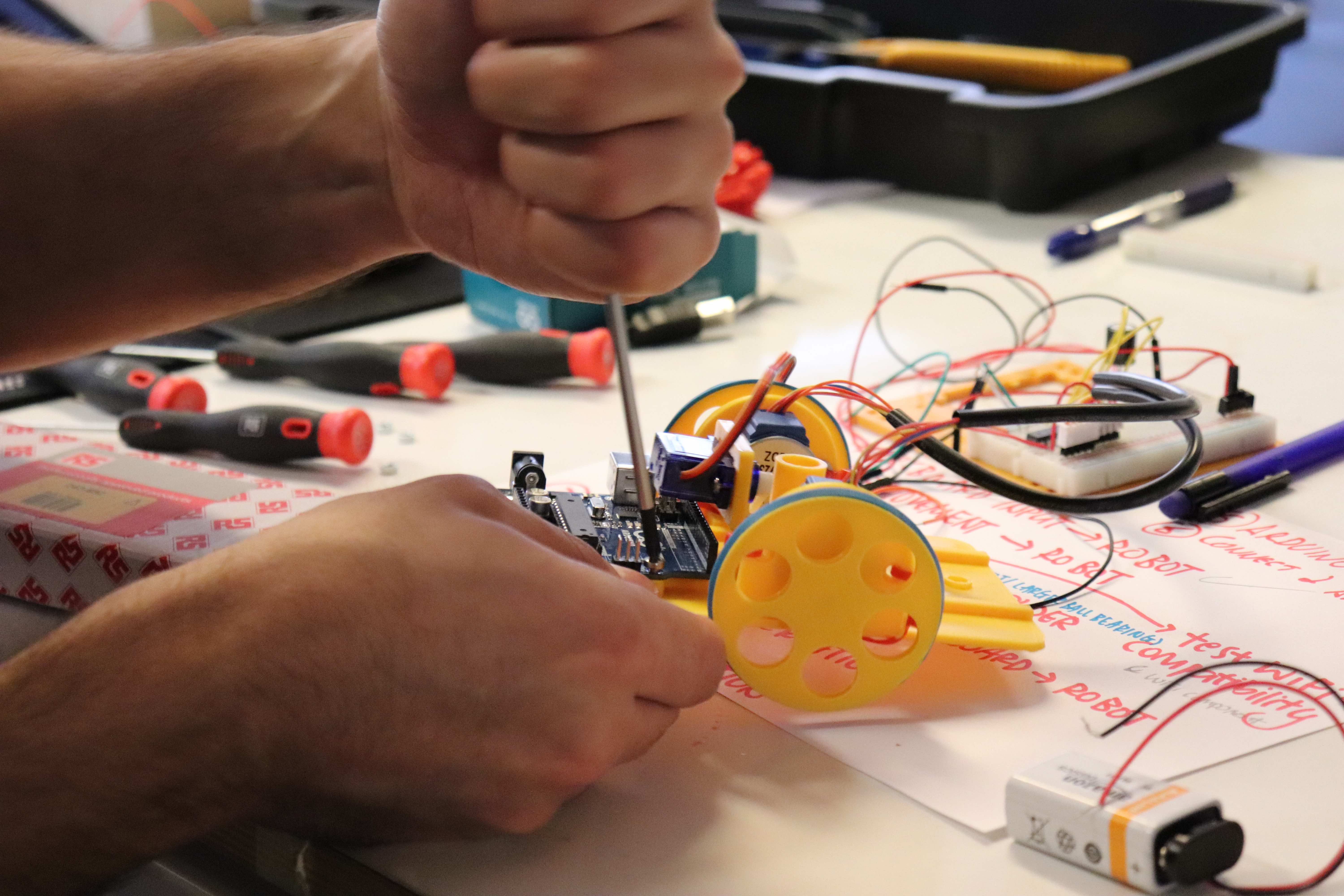
Low fidelity prototype of the drawing robot
Team brainstorming on opportunity areas
Low fidelity prototype of the drawing robot

Prototyping the user experience
Team brainstorming on opportunity areas
Prototyping the user experience
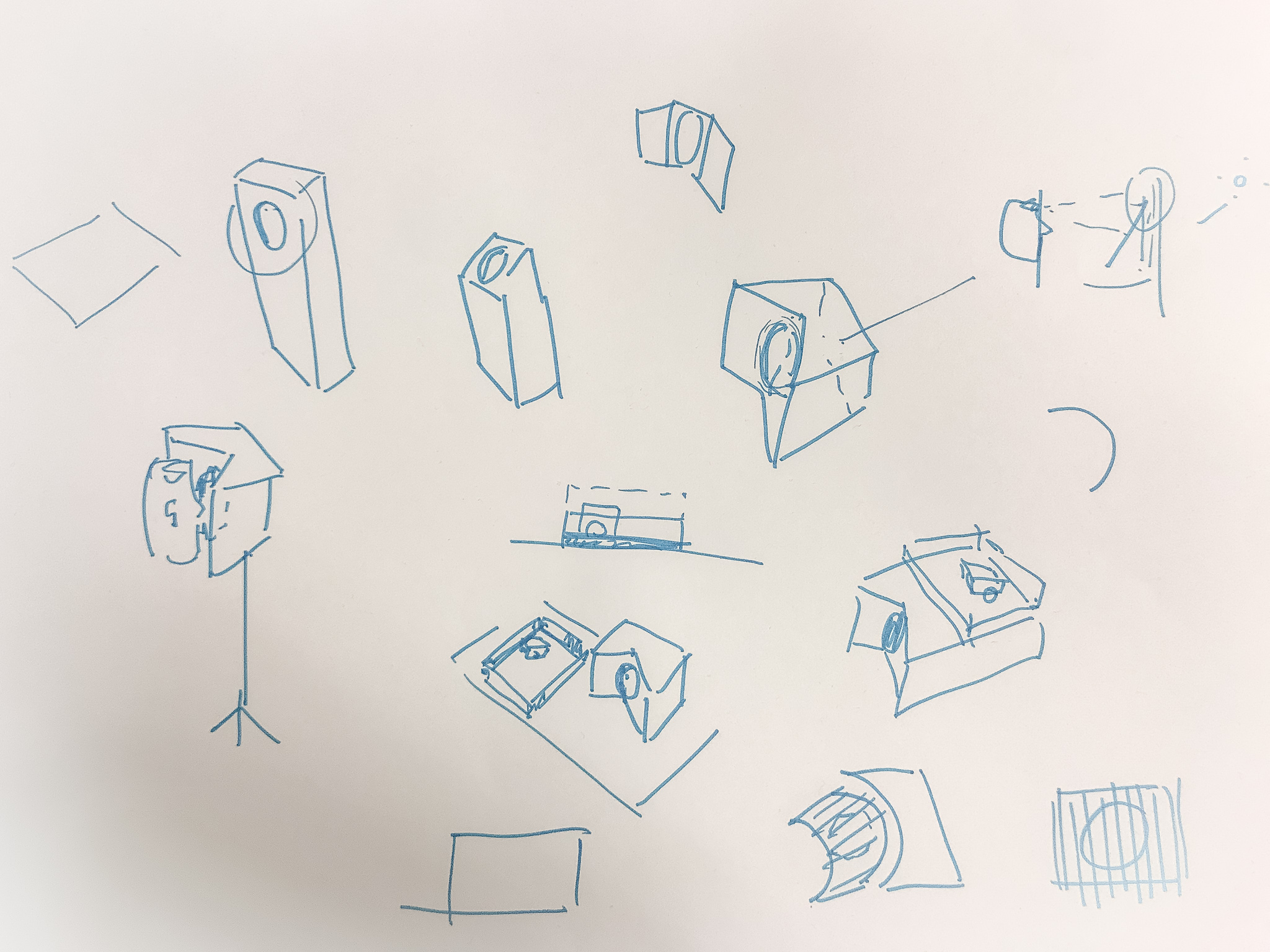
Initial sketches of the experience set up
Team brainstorming on opportunity areas
Initial sketches of the experience set up
Testing movements on the initial prototype
Interview to better understand people's charging habits
Testing movements on the initial prototype
3D printing the drawing robot
Interview to better understand people's charging habits
3D printing the drawing robot
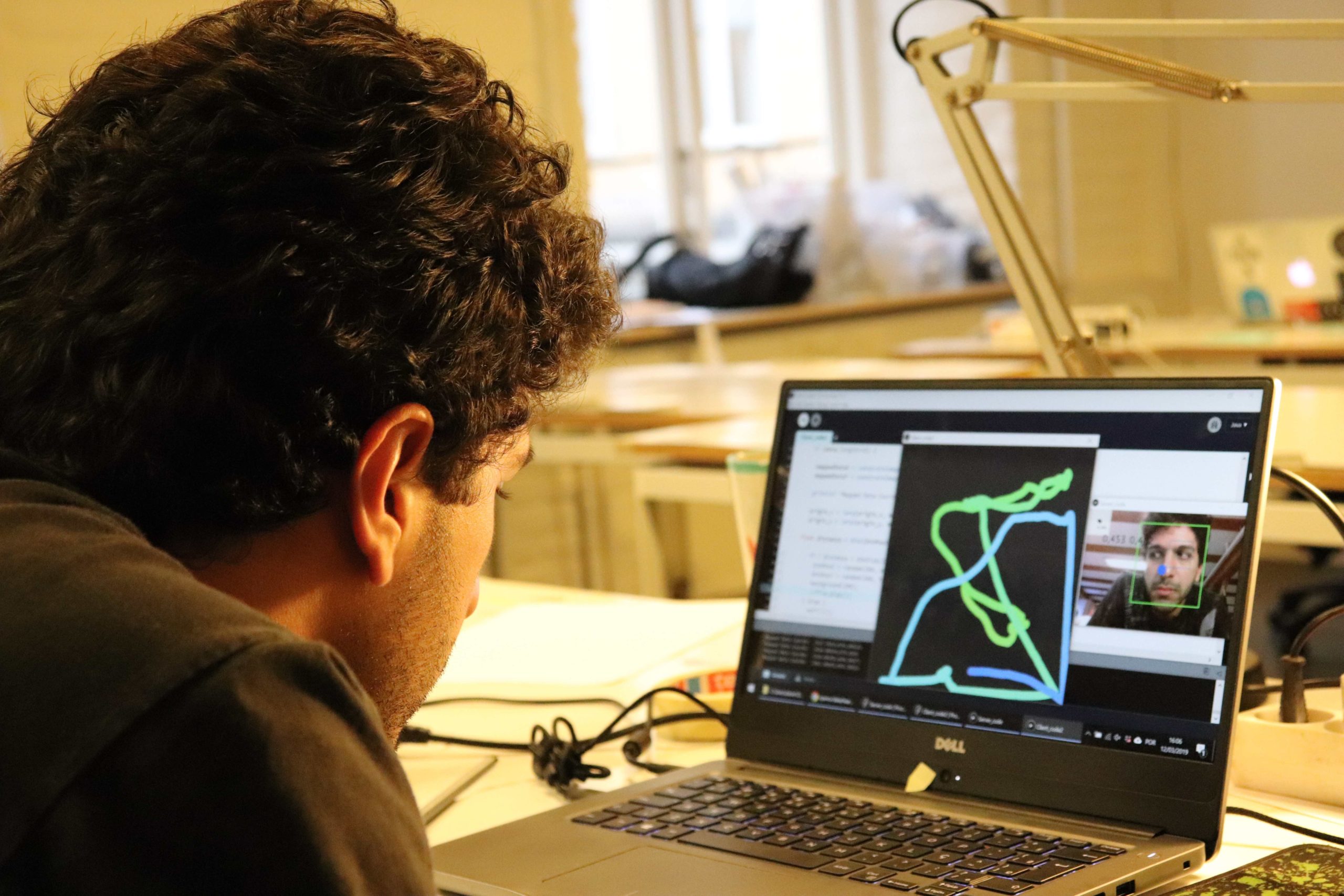
Testing the eye tracking feature on Processing
Interview to better understand people's charging habits
Testing the eye tracking feature on Processing
LEARNINGS
LEARNINGS
LEARNINGS
LEARNINGS
LEARNINGS
work in parallel
As a team, we learned to test our ideas early on and to prototype and code in parallel. We regrouped often during the day to maintain effective communication. This arrangement helped us achieve a lot more with less time.
live communication between arduino & processing
In learning that Processing communicates at a much faster rate than the robot would respond, we calibrated the time it took for Processing to relay messages to the Arduino. This creates an instant feedback between the user’s eye movement and the robot’s drawing.
work in parallel
As a team, we learned to test our ideas early on and to prototype and code in parallel. We regrouped often during the day to maintain effective communication. This arrangement helped us achieve a lot more with less time.
live communication between arduino & processing
In learning that Processing communicates at a much faster rate than the robot would respond, we calibrated the time it took for Processing to relay messages to the Arduino. This creates an instant feedback between the user’s eye movement and the robot’s drawing.
work in parallel
As a team, we learned to test our ideas early on and to prototype and code in parallel. We regrouped often during the day to maintain effective communication. This arrangement helped us achieve a lot more with less time.
live communication between arduino & processing
In learning that Processing communicates at a much faster rate than the robot would respond, we calibrated the time it took for Processing to relay messages to the Arduino. This creates an instant feedback between the user’s eye movement and the robot’s drawing.
work in parallel
As a team, we learned to test our ideas early on and to prototype and code in parallel. We regrouped often during the day to maintain effective communication. This arrangement helped us achieve a lot more with less time.
live communication between arduino & processing
In learning that Processing communicates at a much faster rate than the robot would respond, we calibrated the time it took for Processing to relay messages to the Arduino. This creates an instant feedback between the user’s eye movement and the robot’s drawing.
work in parallel
As a team, we learned to test our ideas early on and to prototype and code in parallel. We regrouped often during the day to maintain effective communication. This arrangement helped us achieve a lot more with less time.
live communication between arduino & processing
In learning that Processing communicates at a much faster rate than the robot would respond, we calibrated the time it took for Processing to relay messages to the Arduino. This creates an instant feedback between the user’s eye movement and the robot’s drawing.